显微镜相机参数基本知识
显微镜相机可以用数字方式捕捉并永久记录显微镜下图像,通过计算机等设备读取图像文件并可以在显示器上显示图像,同时还可以通过图像采集软件进行图像调整和定量分析。
目前相机传感器主要分为以下四种类型:
1. CCD:CCD是电荷耦合器件的首字母缩写。简而言之,CCD是具有光敏区域并作为数码相机传感器使用的半导体芯片。CCD传感器捕获光子并将其转换为电荷,而电荷则是用于成像的数字像素数据。传统上看,CCD传感器是科学研究应用的最佳选择。但是随着新传感器技术的出现,这种较为老旧的技术正逐渐风光不再。
2. EMCCD:EMCCD代表电子倍增电荷耦合器件。EMCCD是一种可以将高于CCD读取噪声的弱光信号放大的CCD传感器。在传统CCD中,极低的信号水平通常低于传感器的读取噪声,因此其成像能力在以快速帧率捕捉极低光照水平下图像的应用中受到限制。EMCCD相机以检测弱光而著称,所以您可能有时候听见有人将其称为弱光相机。由于具有较高灵敏度,它因此成为在极弱光线下捕捉快速生物现象的有效工具。
3. CMOS:CMOS即互补金属氧化物半导体,也是CCD技术的后继产品。CMOS和CCD之间的首要区别是信号电子的读取架构。由于为单光敏二极管提供多读出放大器,CMOS的读取速度明显快于CCD。快速读取的弊端在于卷帘快门失真。由于CMOS快速扫描整个图像以收集数据,而非每次捕捉一个像素,因此曝光时间差有时会导致失真。 相比之下,CCD传感器可以通过在存储电荷同时收集入射光子避免这种失真,从而让其能够同时读出每个像素。传统上,CMOS的信噪比低于CCD,但现在已经推出很多高质量的CMOS相机。另外,全局快门CMOS的引入解决了卷帘快门失真问题。
4. sCMOS:sCMOS是科研级互补金属氧化物半导体的缩写,通常也缩写为科研级CMOS。sCMOS是一种具有大尺寸像素和低噪声性能的CMOS传感器。其具备比常规CMOS更高的灵敏度。通常我们会像冷却CCD传感器一样,通过对sCMOS进行冷却来最大限度减少暗电流,以此获得更高的信噪比。sCMOS和EMCCD相机之间最重要的区别是sCMOS相机不具备长时间曝光的能力。对于需要长时间曝光或具有弱荧光信号的生物发光成像应用,EMCCD相机是首选,而sCMOS相机由于其能够与多种成像技术配合使用而广受欢迎。
由于技术的不断进步,市场上涌现出了很多高品质的显微镜相机。相机成像性能由相机特定术语和规格决定,本文旨在介绍显微镜相机常见的规格参数,以提供关于如何选择合适的相机来获得高质量图像的指导。
分辨率
分辨率是显微镜可用于观察难以光学解析的微小结构。光学分辨率限制意味着更多的像素或较小的像素间距并不始终能够提供更高的分辨率。获得更好分辨率的关键在于选择与数值孔径(NA)、光学系统总倍率以及样品空间频率相关的适当像素间距。
许多人认为像素越多,分辨率就越高,图像质量也越好。这种说法其实是不正确的。事实上决定相机分辨率的是像元尺寸而非个数。像元尺寸越小,分辨率越高。但要注意的是,要实现高分辨率的图像,需要将像元尺寸和显微镜的光学分辨率相匹配。
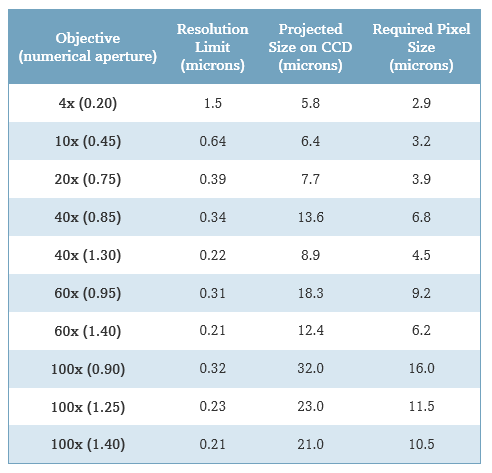
在选择相机的时候,如果是极弱光和高速的应用,需要追求极限灵敏度,那么选择像元尽量大的相机;如果追求分辨率,那要选择像元尽量小的相机。但由于受限于物镜分辨率,更小的像元不能提高整个系统的分辨率。通常情况下,低倍率物镜要求小像元相机与之匹配,高倍率物镜要求大像元相机与之匹配。
QUANTUM 效率
QUANTUM 效率(缩写为 QE) 是传感器以特定波长将光子转换为电子的百分比,QE 越高意味着探测光线的灵敏度越高,使其在弱光应用环境更有利。此外,某些传感器可能还经过特别调整,以便在不同的波长范围内实现更高的灵敏度。根据您的应用环境,特定波长下的 QE 结果可能比其他因素更为重要。

普通CCD/CMOS芯片采用前照式技术,像素表面有部分被不透光的金属结构覆盖,光无法透过,导致QE损失。为提高QE,现代芯片在每个像素表面加做了微透镜(micro lens),使部分本来照射到金属结构上的光偏转,聚焦到芯片感光区域。这样能对CMOS 芯片的QE有一定提高。
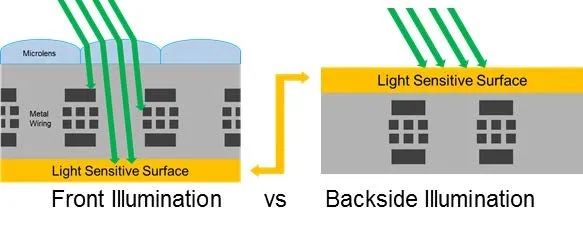
最新的背照式芯片技术将芯片反过来,光直接照射在芯片上,不用穿过上述的金属结构层,对信号的阻挡也就不存在了。这样可以获得近乎完美的95% 峰值量子效率而且可以实现低至200nm的深紫外和高至1100nm的近红外探测。
噪声
即相机成像过程中固定存在的三种主要噪声。它们分别是:颞暗噪声、散粒噪声和暗电流噪声。
颞暗噪声是无信号时传感器中的噪声,颞暗噪声越低意味着图像越清晰。所有传感器都会产生一定程度的颞暗噪声,这是由传感器上的电子元件造成的。颞暗噪声不受曝光时间的影响,不包括散粒噪声。新版传感器可利用新技术优势来降低颞暗噪声。CCD / EMCCD和sCMOS相机由于传感器的信号读出结构不同,颞暗噪声有很大差别。sCMOS相机的读出噪声远低于CCD/EMCCD。
散粒噪声是一种固有的物理现象,它是由于光子发射过程的不确定性导致的,反映了 光子到达率存在的统计偏差。散粒噪声是信噪比中重要的影响因素。它决定了即使是没有任何噪声的理想相机,信噪比也不是无穷大的。事实上,散粒噪声在大多数情况下是影响信噪比的最大元凶。
暗电流是相机传感器内部的硅晶格产热所产生的多余电子,它是随时间累积的单位是 每个像素每秒产生的电子 (e-/p/s)。因此在长时间曝光的应用中,暗电流是一个需要着重考虑的因素。高速成像中,暗噪声影响几乎可以忽略,对于长时间曝光的应用,暗噪声会随着曝光时间线性增加,暗噪声小的相机(如制冷CCD相机)会更有优势。制冷是降低暗电流的主要措施,一般来说,温度每降低7°C,暗电流减半。一般来说-25℃左右的制冷温度已经能够满足绝大部分应用需求。
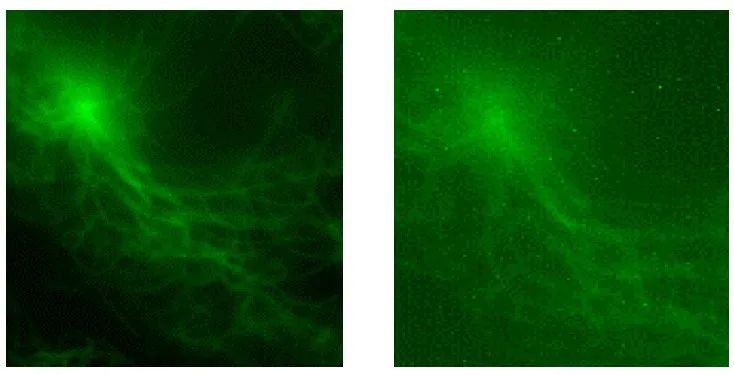
以上为制冷(左)和未制冷(右)的相机成像效果对比:
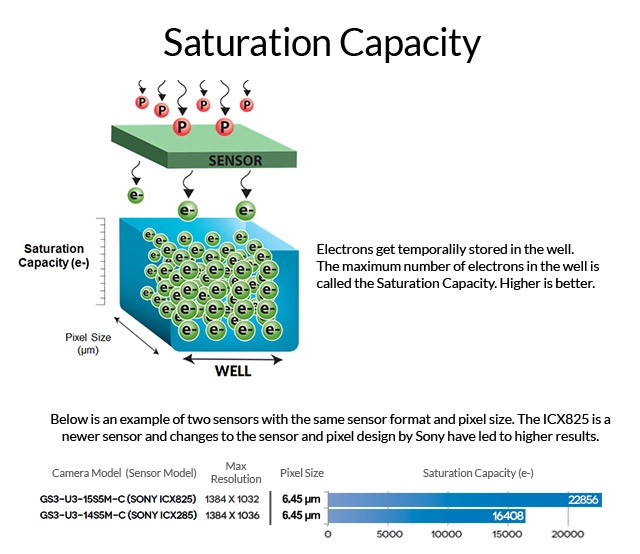
饱和容量
每个像素就像是一口井或一个桶,能够容纳一定数量的电子。饱和容量表明了单个像素能够储存的最大电子数,这与传感器的像素大小有关。饱和容量越大,潜在动态范围便越大。该数目越小,像素达到最高电荷的速度就越快。想象一下,如果所有像素均达到饱和容量,那么监视器会显示白屏。仅凭饱和容量这一项并不能全面衡量传感器的性能,因为颞暗噪声和量子效率需要与饱和容量互相结合,进而才能得出动态范围与信噪比结果。
信躁比
信噪比是饱和状态下信号与噪声之比。饱和状态下的噪声主要为散粒噪声。信噪比的值越高,所获得图像的对比度和清晰度相对于图像中的噪声而言便会越高。例如,如果SNR 为1,您所拍摄的对象与图像中的噪声相比便难以识别。在光线极低的应用环境下,比如暗视野显微镜和荧光成像,高信噪比是一项重要的规格。一般SNR需高于 35 dB。
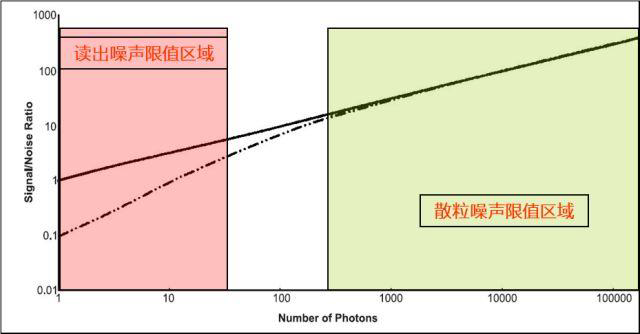
上图为理想和实际信噪比曲线,在信号比较强的情况下,散粒噪声远远大于读出噪声,信噪比位于散粒噪声控制区域,这时决定信噪比的仅仅是信号强度和量子效率,增加曝光时间,加强激发光功率,或提高相机量子效率都能提高图像信噪比。
不过,在许多实际应用尤其是活细胞成像中,为了避免光漂白、光毒性,或是为了提高速度,曝光时间很短,激发光强度也相对较弱,信号常常处在相对较低的水平。这时,信噪比位于读出噪声控制的区域,读出噪声对信噪比的影响比较大。相机灵敏度相同时,读出噪声越低,信噪比越高。
动态范围
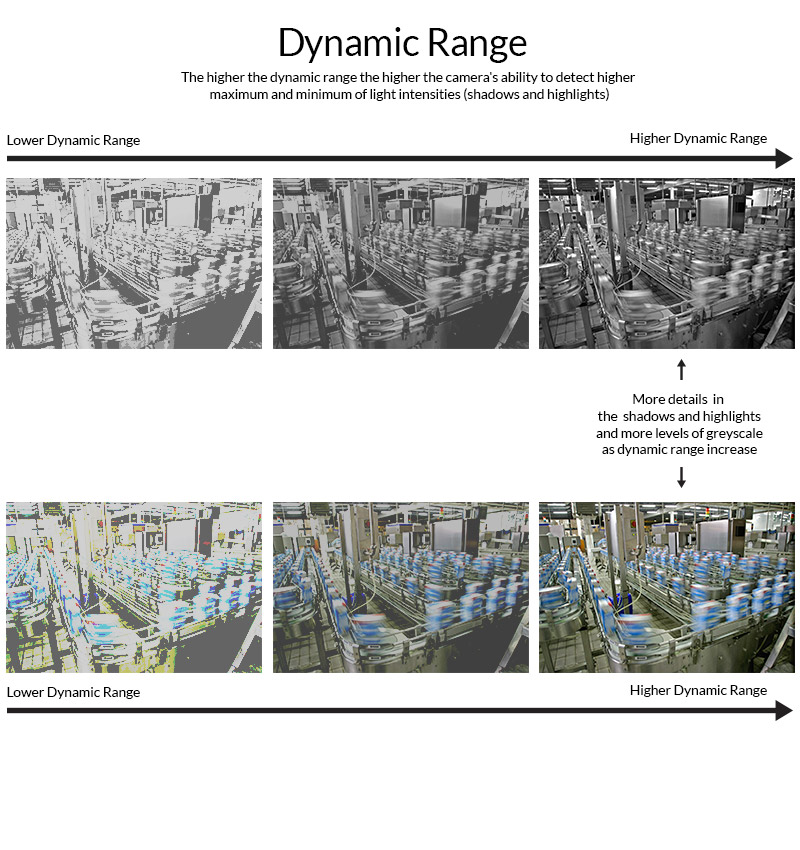
动态范围是饱和状态下的信号与传感器能测量的最低信号之比。动态范围越大,所获得图像的灰度细节等级就越高。换言之,动态范围表明了相机探测最大和最小光强度的能力(阴影和高光)。动态范围较高的型号能够探测到更多细节。在室外应用场景下,当明亮区和黑暗区同时成像或者相机处在快速变化的光照条件下,动态范围越高越好。
绝对灵敏度
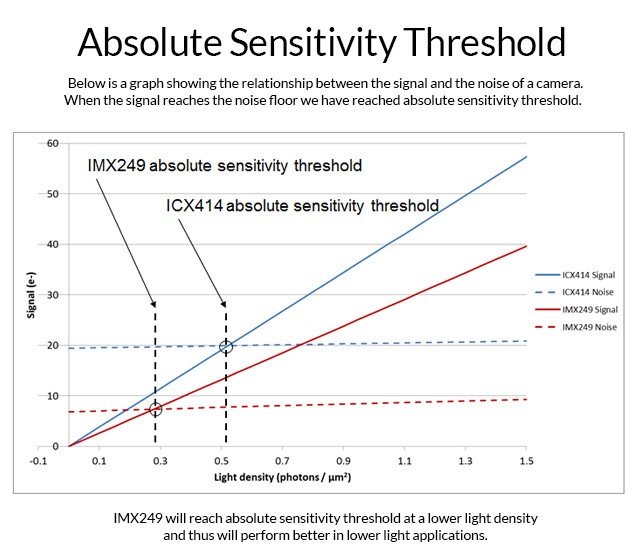
绝对灵敏度阈值是使信号等于噪音所需的光子数。光子数量越少,相机能从图像噪声中识别出有用成像数据的效果就越佳。此规格对于光线极低的应用环境而言尤为重要。与仅看QE或噪声不同,绝对灵敏度阈值还能使我们更加了解传感器的低光性能,因为该阈值同时考虑了传感器的QE和颞暗噪声与散粒噪声。
增益
该参数用于表明要发现16位ADU中的变化而需更改的电子数量(更多地被称为灰度)。16位灰度相当于65535特有灰度级别,将需要特定数目的电子,才能使传感器跳转至下一个灰度级。
广州浩康生物科技有限公司